
新闻中心





无人机室内飞巡作业技术
无人机室内飞巡作业,该系统主要分为飞行平台、任务载荷、UWB室内定位系统以及系统整合等方面,瑞宇通信联合西工大专家对UWB室内定位系统和无人机飞控系统进行了二次开发,使用该系统飞行器会根据基站的定位感知自身的位置,即可实现无GPS状态下的室内定位。
一、技术难点
该系统主要技术难点在于无人机任务载荷在没有GPS信号的室内采用UWB室内定位系统进行飞巡作业。目前国内还未有单位开发出相应的无人机室内定位系统,结合该项目需要对UWB室内定位系统进行二次开发,将UWB室内定位系统与飞控、无人机整合成一套完整成熟的系统。
二、技术方案
1、 飞行平台介绍
飞行平台主要采用筋斗云系列S900旋翼无人机(也可采用其它旋翼无人机),S900 采用 V 型 6 旋翼设计,主要结构部件均采用质量强度比极高的碳纤维复合材料,在保证机身结构强度、刚度的同时大幅减轻重量。机身结构的系统性能兼容各类型多旋翼飞控。
S900采用独特的上中心版设计,可快速拆卸的上中心板,使整机动力系统、控制系统布置和更改方便快捷。其中上中心板框架和飞机的下中心板通过优化的连接柱和机臂安装座进行连接,在保证整体结构强度的同时实现上中心板盖板的可拆卸功能。
S900具备独有的压片式电源线插座,提高可靠性的同时简化了电源走线。高效、可靠、安装方便,用户不需要做任何焊接工作便可完成整机组装。镀金的金属支座和压片组装后焊接到下中心板,机臂的电源线耳通过螺钉拧紧到压片和支座之间,提供高安全可靠的供电线路。独特的方形螺钉设计,既可以方便螺钉的拆装,也可以通过四边形外边和中心板保护盖的方孔定位配合,防止螺丝由于机臂的震动而出现松动的现象,确保供电的安全可靠。

图1. S900飞行器
S900飞行器主要技术参数如下:
|
项目 |
技术参数 |
|
起飞重量 |
4.7kg-8.2kg |
|
整机重量 |
3.3kg |
|
动力电池 |
Lipo |
|
最大功耗 |
3000w |
|
悬停时间 |
20min |
|
工作环境温度 |
-10℃—+40℃ |
|
工作电压 |
22.8V |
|
工作电流 |
40A |
2、飞控二次开发
(1)、飞控简介
Pixhawk是一种先进的自动驾驶仪,由PX4开放硬件项目设计和3D机器人制造。它具有来自ST公司先进的处理器和传感器技术,以及NuttX实时操作系统,能够实现惊人的性能,灵活性和可靠性控制任何自主飞行器。Pixhawk旗舰版模块将伴随着新的外设选项,包括数字空速传感器,外部多色LED指示灯支持和外部磁强计。所有的外围设备自动检测和配置。
Pixhawk系统的优点包括:集成多线程,类似Unix / Linux类的编程环境;全新的自动驾驶功能,如任务和飞行行为的Lua脚本;一个自定义PX4驱动层以确保在所有任务具有严格的时序。这些先进的功能确保在你的飞行器上不存在任何限制。
飞控主要特点如下:
l 先进的32位ARM CortexM4高性能处理器,可运行NuttX RTOS实时操作系统
l 14个PWM/舵机输出(其中8个具有安全和手动控制功能,另外6个辅助,兼容高功率);
l 外设丰富(UART,I2C,SPI,CAN)
l 余度设计,集成备份电源和基本安全飞行控制器,主控制器失效时可安全切换到备份控制
l 备份系统集成混控功能,提供自动和手动混控模式
l 冗余电源输入和自动故障转移
l 外部安全按钮以容易启动电机
l 外部安全按钮以容易启动电机
硬件主要参数如下:
l 32位 STM32F427 Cortex M4,,带硬件浮点处理单元
l 主频:168MHZ,256K RAM,2M Flash
l 32位 STM32F103备份协处理器
l ST公司L3GD20 3轴数字16位陀螺仪
l ST公司LSM303D 3轴14位 加速度/磁强计
l Invensense公司MPU6050 3轴陀螺/加速度计
l MEAS公司 MS5611高精度气压计
l 带有自动故障转移的理想二极管控制器
l 所有外设均有过流保护,所有输入为ESD保护
(2)、飞控二次开发内容
飞控二次开发主要内容主要是底层驱动——传感器数据——姿态解算——PID控制器——飞行模式切换——参数调优。
本次二次开发的内容主要在于传感器数据和姿态解算方面,因为GPS在室内无进行定位,所以无法获取GPS定位信息,故通过UWB系统给出位置信息给予飞控进行姿态解算。

(部分图示)
本次开发主要就是进行算法的改变,通过改进算法获取UWB位置信息来取代GPS的定位。
3、UWB接收端二次开发内容
因UWB本身获取的位置数据流无法直接用于飞控,故需对UWB本身获取的位置数据进行相关转换,通过开发相应的算法来转换为飞控所需要的数据,从而替换GPS的位置信息。
(部分图示)
4、任务载荷
根据不同的项目应用,可以选择可见光载荷、红外热成像载荷、气体探测器载荷、照明载荷、语音载荷、通信链路载荷等等。瑞宇通信在本技术方案中就不一一列举。
5、 UWB系统
(1)、UWB技术原理
超宽带(Ultra Wide-Band,UWB)是一种新型的无线通信技术,根据美国联邦通信委员会的规范,UWB的工作频带为3.1~10.6GHz,系统-10dB带宽与系统中心频率之比大于20%或系统带宽至少为500MHz。UWB信号的发生可通过发射时间极短(如2ns)的窄脉冲(如二次高斯脉冲)通过微分或混频等上变频方式调制到UWB工作频段实现。
超宽带的主要优势有,低功耗、对信道衰落(如多径、非视距等信道)不敏感、抗干扰能力强、不会对同一环境下的其他设备产生干扰、穿透性较强(能在穿透一堵砖墙的环境进行定位),具有很高的定位准确度和定位精度。
(2)、UWB定位原理
该技术采用TDOA(到达时间差原理),利用UWB技术测得定位标签相对于两个不同定位基站之间无线电信号传播的时间差,从而得出定位标签相对于四组定位基站的距离差。使用TDOA技术不需要定位标签与定位基站之间进行往复通信,只需要定位标签只发射或只接收UWB信号,故能做到更高的定位动态和定位容量。
天域UWB定位系统产品即使用UWB-TDOA技术实现了高精度、高动态、高容量、低功耗的定位系统。
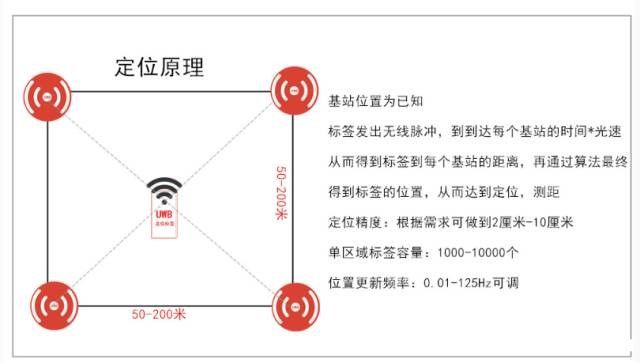
图5. UWB定位原理
(3)、UWB二次开发
因UWB的定位数据需要实时传输到飞控系统当中,故需对飞控系统进行二次开发。本次飞控采用PX4通用平台,其固件的架构如下图:

图6. 固件架构图
因本次开发只涉及应用层的开发,抓取定位数据流,并通过改动必要的算法,让飞控实时并且精准的获取UWB标签得到的定位数据,再通过定位数据准确的控制飞行器的位置及姿态。因UWB高度的定位误差较大,通过辅助高度传感器获取较为准确的高度数据,使飞控实时的处理高度信息,并准确控制飞行器高度。
除去飞控系统的二次开发还需进行UWB硬件本身的开发调试以及配套UWB系统的上位机开发。
UWB硬件的调试依托成熟的UWB硬件本身进行,使UWB标签能够准确的获取基站返回的数据并通过自身算法计算出自身位置信息。
上位机的开发用于配套UWB使用,开发运行于Windows平台的上位机,用于UWB调试、观测、开发等功能。使其支持多个波形同步显示、二维地图加载、电子围栏、散点显示、运动轨迹显示与回放、三维显示、数据导出等功能,
(4)、UWB项目实施
目前拟采用成熟UWB无线定位系统,通过布置4-6个位置已知的基站。通过布置在无人机上的标签发出的无线脉冲,通过到达基站的时间得到标签到达每个基站的距离,然后再通过位置算法就可以确定标签(无人机)的具体位置。
已知大小的定位面积,假定已知标准尺寸为120米(长)×90米(宽)。每隔40m布置一个基站,共布置4-6个基站形成一个矩形定位区域,基站布置高度高于飞行高度,即可实现无GPS下的二维精准定位。
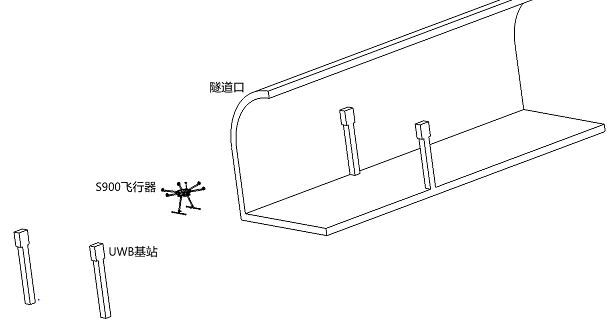
图7. UWB定位实施示意图
因UWB定位系统Z轴定位误差较大,故高度定位采用气压计+辅助定高传感器来实现高度的准确控制。所以无人机飞控系统需采用开源PIXHACK,并外接入辅助定高传感器以及UWB标签,通过UWB进行二维的精确定位,然后通过辅助定高传感器进行高度控制,以此来共同实现3维的定位。
6、系统整合
系统整合主要包括图像以及飞行器状态数据的整合。
载荷采集主要采用图传电台收集信息传输到接收端。
飞行器状态数据主要通过数传电台传输到地面站上用于实时监测飞行器状态信息。大致示意图如下:
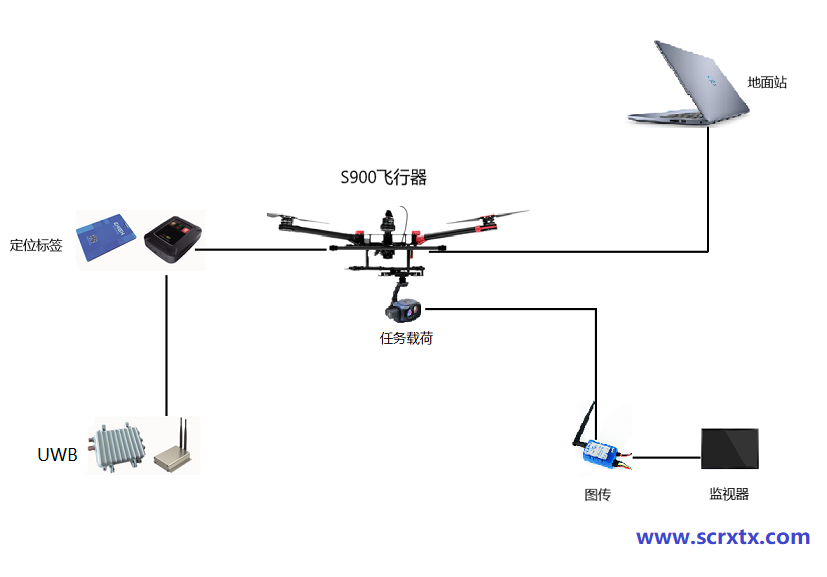
图8. 整合示意图
【瑞宇通信专业卫星应急通信已20余年 客服电话:18981780967 网址:www.scrxtx.com 】


请输入搜索关键字
确定